
إنها تجربة مألوفة في مرافق التخزين الذاتي والمباني ذات الممرات الطويلة الخالية من الميزات. يدفع العميل عربة إلى داخل ممر مظلم، لتضاء الأنوار بعد فوات الأوان بلحظة، إما فوق رأسه مباشرة أو، والأسوأ من ذلك، خلفه تمامًا. يجد العميل نفسه مجبرًا على المضي قدمًا باستمرار نحو الظلام، مما يولد شعورًا دائمًا بأنه متأخر بخطوة. إنه خطأ بسيط في التصميم يخلق شعورًا كبيرًا بعدم الارتياح والابتذال. الحل لا يكمن في جعل الأنظمة الحالية أكثر حساسية، بل في جعلها أكثر ذكاءً.
يمكن حل مشكلة "تأخر الإضاءة" هذه نهائيًا باتباع نهج منهجي يحول إضاءة المبنى من نظام تفاعلي إلى نظام استباقي. فمن خلال التخطيط الدقيق لأماكن وضع المستشعرات، وتوجيهها، وتوقيتها، يمكنك خلق تجربة سلسة تضاء فيها المسارات دومًا قبل وصول الشخص بوقت كافٍ، لتُرشده إلى الأمام وكأنها تُقاد بيد خفية. تضمن هذه الطريقة ألا يضطر العملاء أبدًا إلى دفع عرباتهم نحو الظلام مجددًا.
مشكلة الممرات المشتركة: مطاردة الضوء
في الأنظمة القياسية التي تعمل بالحركة، يتحكم مستشعر واحد في منطقة إضاءة مخصصة. وعندما يدخل شخص ما إلى تلك المنطقة، يكتشف المستشعر الحركة ويقوم بتشغيل وحدات الإضاءة. وفي الممرات الطويلة، يخلق هذا تجربة مفككة بالانتقال من بقعة ضوئية إلى أخرى، فالنظام يتفاعل دائمًا مع التواجد ولا يستبق النية. ونتيجة لذلك، يجد المستخدم نفسه دائمًا على حافة منطقة الاستشعار، مما يؤدي إلى تشغيل الضوء فور وصوله فقط وإجباره على "مطاردة الضوء" على طول الممر — وهو تذكير دائم بتأخر استجابة النظام.
فخ الحساسية: لماذا يؤدي رفع درجة المؤشر إلى حدوث المزيد من المشاكل
الرد الأكثر شيوعًا على تأخر الإضاءة هو زيادة حساسية مستشعرات الحركة. ويبدو هذا المنطق سليمًا نظريًا: فالمستشعر الأكثر حساسية يجب أن يكتشف الحركة من مسافة أبعد ويفعل الإضاءة في وقت أقرب. ولكن عمليًا، غالبًا ما يأتي هذا النهج بنتائج عكسية ويتسبب في مشكلات جديدة.
التشغيل الزائف الناتج عن حركة المرور المتقاطعة بالممرات
تؤدي إعدادات الحساسية العالية إلى جعل المستشعرات، وخاصة الأنواع التي تعمل بالأشعة تحت الحمراء السلبية (PIR)، عرضة بشكل كبير لاكتشاف الحركة خارج منطقتها المستهدفة. وفي مرافق التخزين الذاتي، يعني هذا أن الشخص الذي يسير في الممر الرئيسي يمكنه تفعيل الأضواء في ممر متقاطع لا ينوي دخوله على الإطلاق. يؤدي هذا التفعيل المتقاطع للممرات إلى هدر الطاقة ويخلق تأثير "عرض ضوئي" مشتت للانتباه، حيث تضاء الممرات الفارغة وتطفأ باستمرار. يصبح النظام مزعجًا وغير فعال، ليحل مشكلة واحدة عبر خلق مشكلة أخرى.
العائد التناقضي للحساسية العالية
بعد نقطة معينة، لا تقدم زيادة الحساسية أي فائدة للاكتشاف المبكر على طول مسار طويل وضيق. فقدرة المستشعر على رصد الحركة تعتمد على تصميم عدسته وطبيعة الحركة نفسها. فالحركة المتجهة مباشرة نحو مستشعر PIR أو المبتعدة عنه يصعب رصدها بطبيعتها مقارنة بالحركة التي تقطع مجال رؤيته. وإن رفع الحساسية إلى أقصى حد لا يغير هذا القيد الأساسي؛ بل يجعل المستشعر فقط أفضل في التقاط الحركات الصغيرة الهامشية — والتي غالبًا ما تكون المصدر الأساسي للتفعيل الزائف. وتظل المشكلة الجوهرية المتمثلة في رصد الحركة الأمامية عن بعد دون حل.
المبدأ التأسيسي: من التفاعل إلى الاستباق
إذا لم يكن رفع الحساسية هو الحل، فما هو إذن؟ يتطلب الحل تحولاً في التفكير: فبدلاً من محاولة جعل النظام التفاعلي أسرع، يكمن الهدف في تصميم نظام استباقي يستخدم الأبعاد الهندسية والمنطق لتوقع مسار المستخدم. لا ينبغي أن تكون الإضاءة استجابة للمكان الذي يتواجد فيه الشخص، بل استعدادًا للمكان الذي يتجه إليه. ويتحقق ذلك من خلال ثلاثة مبادئ منسقة: التوزيع، والتوجيه، والمنطق الزمني.
الركيزة 1: التوزيع الهندسي ومخطط المستشعرات المتناوبة
إن المستشعر الواحد، مهما بلغت قوته، يمثل نقطة فشل واحدة ذات منطقة استشعار محدودة. والمفتاح لتغطية الممرات بفعالية هو استخدام مستشعرات متعددة في ترتيب يخلق مجالات رؤية مستمرة ومتداخلة. وتعد الهندسة الأكثر فعالية لتحقيق ذلك هي المخطط المتناوب؛ فبدلاً من وضع المستشعرات في خط مستقيم أسفل منتصف الممر، يتم تبديل مواضعها من جانب إلى آخر في الممر.
ربما تكون مهتماً بـ

- مستشعر إشغال PIR يثبت على السقف مع مخرج ريليه تلامس جاف
- مزود طاقة بجهد منخفض 12/24VDC أو 12/24VAC
- نقاط تلامس ريليه معزولة COM و NO و NC لمدخلات أنظمة إدارة الطاقة (EMS) والتكييف (HVAC) والتحكم في المباني

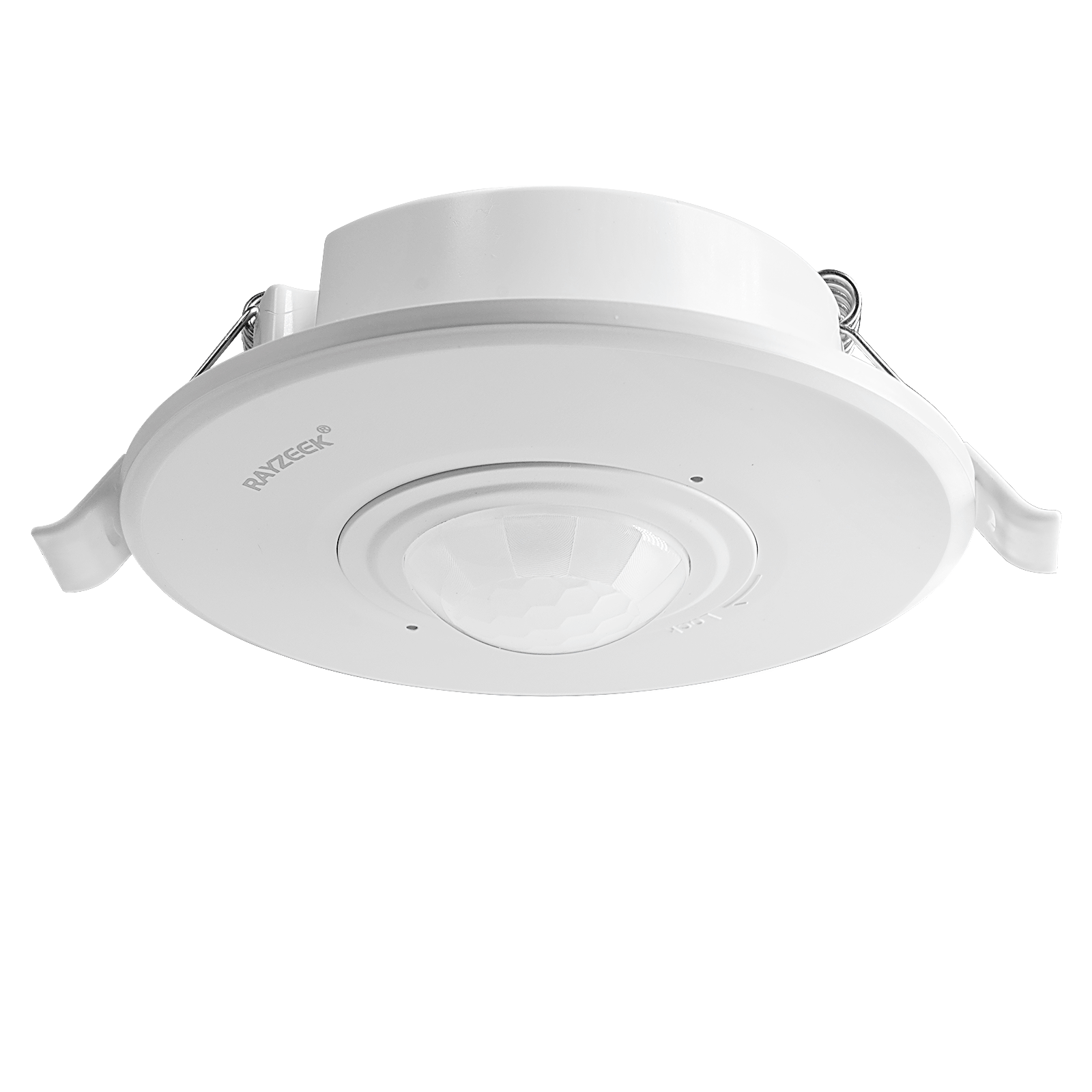
- مفتاح مستشعر حركة ميكروويف غاطس يثبت على السقف بجهد تيار مستمر منخفض
- مدخل 12 VDC / 24 VDC مع نطاق 10-30 VDC
- تيار عمل أقصى 10A مع تأخير زمني قابل للتعديل، وعتبة Lux، والحساسية
- مفتاح مستشعر حركة ميكروويف غاطس يثبت على السقف للأحمال العالية
- مدخل جهد الخط 100-265 VAC، موديل 10A
- استشعار ميكروويف بتردد 5.8 جيجاهرتز مع تأخير زمني قابل للتعديل، وعتبة Lux، والحساسية
- مفتاح مستشعر حركة ميكروويف غاطس يثبت على السقف
- مدخل جهد الخط 100-265 VAC، موديل 5A
- استشعار ميكروويف بتردد 5.8 جيجاهرتز مع تأخير زمني قابل للتعديل، وعتبة Lux، والحساسية
- ديمر مستشعر إشغال RZ037 PIR يثبت على السقف لجهد 220V
- تيار عمل أقصى 3A مع حمل مقدر 660W
- تحكم بزر LUX لتشغيل/إطفاء مستشعر الضوء وسطوع التعتيم المحدد من قبل المستخدم
- ديمر مستشعر إشغال RZ037 PIR يثبت على السقف لجهد 110V
- تيار عمل أقصى 3A مع حمل مقدر 330W
- تحكم بزر LUX لتشغيل/إطفاء مستشعر الضوء وسطوع التعتيم المحدد من قبل المستخدم

- مفتاح مستشعر حركة بالموجات الدقيقة يركب على السقف بتيار مستمر جهد منخفض
- مدخل 12 VDC / 24 VDC مع نطاق 10-30 VDC
- تيار عمل أقصى 10A مع تأخير زمني قابل للتعديل، وعتبة Lux، والحساسية
- مفتاح مستشعر حركة بالموجات الدقيقة يركب على السقف للحمولات العالية
- مدخل جهد الخط 100-265 VAC، موديل 10A
- استشعار ميكروويف بتردد 5.8 جيجاهرتز مع تأخير زمني قابل للتعديل، وعتبة Lux، والحساسية
- مفتاح مستشعر حركة بالموجات الدقيقة يركب على السقف
- مدخل جهد الخط 100-265 VAC، موديل 5A
- استشعار ميكروويف بتردد 5.8 جيجاهرتز مع تأخير زمني قابل للتعديل، وعتبة Lux، والحساسية
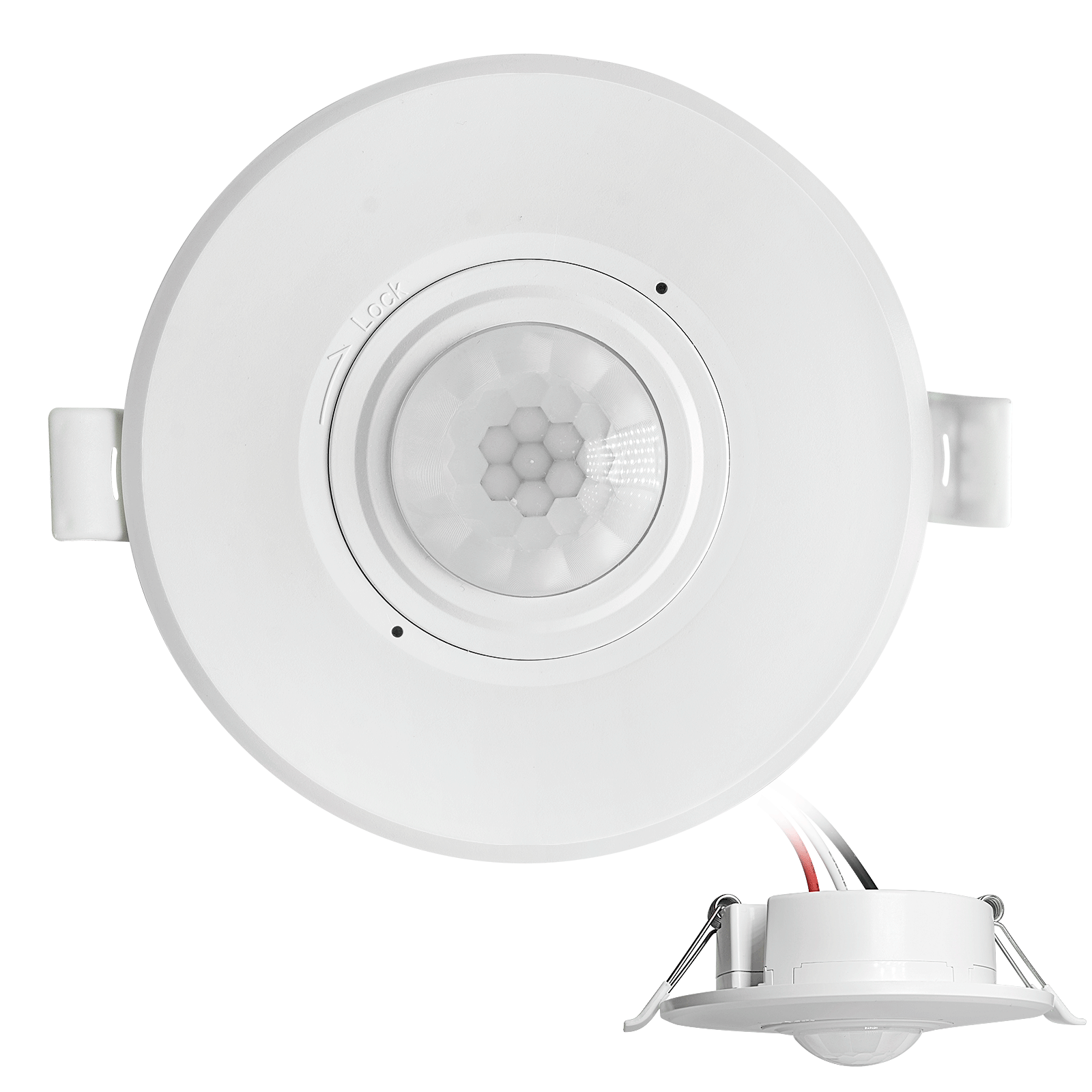
- مفتاح مستشعر حركة بالأشعة تحت الحمراء PIR مدمج في السقف بتيار مستمر جهد منخفض
- مدخل 12 VDC / 24 VDC مع نطاق 10-30 VDC
- أقصى تيار تشغيل 10A مع إمكانية ضبط تأخير الوقت، وعتبة الإضاءة (Lux)، والحساسية
- مفتاح مستشعر حركة بالأشعة تحت الحمراء PIR مدمج في السقف للحمولات العالية
- مدخل جهد الخط 100-265 VAC، موديل 10A
- تغطية ورصد بزاوية 360 درجة مع إمكانية ضبط تأخير الوقت، وعتبة الإضاءة (Lux)، والحساسية
- مفتاح مستشعر حركة بالأشعة تحت الحمراء PIR مدمج في السقف
- مدخل جهد الخط 100-265 VAC، موديل 5A
- تغطية ورصد بزاوية 360 درجة مع إمكانية ضبط تأخير الوقت، وعتبة الإضاءة (Lux)، والحساسية
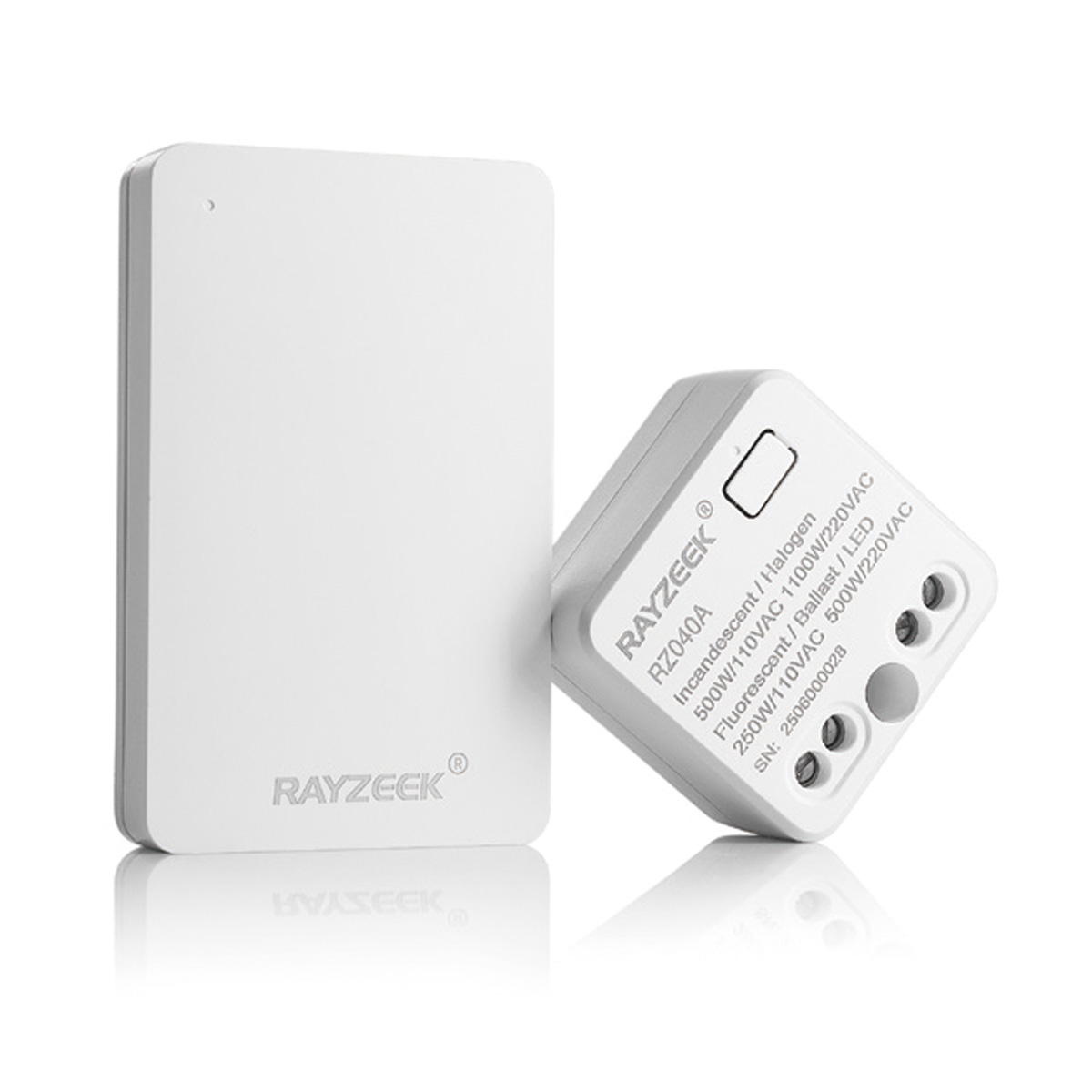
- طقم مفتاح لاسلكي وجهاز مستقبل للتحكم في تشغيل وإيقاف الإضاءة الداخلية
- مستقبل بجهد 100-230VAC وتردد 50/60Hz مع تيار مقنن 5A
- مفتاح لاسلكي يعمل ببطارية CR2032 مع اتصال بتردد 2.4GHz
- وضع الإشغال (تشغيل تلقائي/إيقاف تلقائي)
- 12–24V DC (10–30VDC)، حتى 10A
- تغطية 360 درجة، بقطر 8–12 متر
- تأخير الوقت من 15 ثانية إلى 30 دقيقة
- مستشعر الإضاءة: إيقاف/15/25/35 لوكس (Lux)
- حساسية عالية/منخفضة
- وضع الإشغال (تشغيل تلقائي/إيقاف تلقائي)
- 100–265V AC، بقوة 10A (يتطلب خط محايد)
- تغطية 360 درجة، قطر رصد 8–12 متر
- تأخير الوقت من 15 ثانية إلى 30 دقيقة، عتبة اللوكس: إيقاف/15/25/35، الحساسية: عالية/منخفضة
- وضع الإشغال (تشغيل تلقائي/إيقاف تلقائي)
- 100–265V AC, 5A (يتطلب خط محايد)
- تغطية 360 درجة، قطر رصد 8–12 متر
- تأخير الوقت من 15 ثانية إلى 30 دقيقة، عتبة اللوكس: إيقاف/15/25/35، الحساسية: عالية/منخفضة

- 100V-230VAC
- مسافة الإرسال: تصل إلى 20m
- حساس حركة لاسلكي
- تحكم سلكي ثابت

- الجهد الكهربائي: بطاريتان 2x AAA / 5V DC (Micro USB)
- الوضع الليلي/النهاري
- تأخير الوقت: 15min، 30min، 1h (افتراضي)، 2h
- محول طاقة بمقبس أوروبي
- محول طاقة بمقبس بريطاني
المجالات المتداخلة تقضي على المناطق العمياء

يضمن المخطط المتناوب عدم تواجد الشخص أبدًا في منطقة عمياء للاستشعار أثناء حركته على طول الممر. فقبل أن يخرج من مخروط الاستشعار الخاص بالمستشعر الأول، يكون قد دخل بالفعل في مخروط المستشعر الثاني المثبت على الجدار المقابل في مكان أبعد على طول المسار. هذا التداخل أمر بالغ الأهمية؛ فهو يزود النظام بمعلومات تتبع مستمرة ويتيح انتقالاً سلسًا وتنبؤيًا من منطقة إضاءة إلى أخرى.
هل تبحث عن حلول لتوفير الطاقة تعمل بالحركة؟
اتصل بنا للحصول على حساسات حركة PIR متكاملة، ومنتجات توفير الطاقة التي تعمل بالحركة، ومفاتيح حساسات الحركة، والحلول التجارية للتحكم بالإشغال/الخلو.
اختيار المستشعر المناسب للاكتشاف الطولي
تعزز فعالية هذا المخطط من خلال اختيار المستشعر المناسب. فبينما تعد مستشعرات PIR القياسية شائعة، فإن الأنظمة التي تدمج مستشعرات الميكروويف أو مستشعرات التكنولوجيا المزدوجة يمكن أن تقدم أداءً فائقًا في الممرات الطويلة. وتتميز مستشعرات الميكروويف ببراعة خاصة في اكتشاف الحركة باتجاه المستشعر، مما يعوض نقطة الضعف الأساسية لمستشعر PIR. وفي المخطط المتناوب، يمكن لمستشعر الميكروويف الموجه على طول الممر رصد الشخص القادم في وقت مبكر جدًا، مما يوفر البيانات الحاسم لنظام استباقي.
الركيزة 2: التوجيه الاستراتيجي للاستشعار الاستشرافي
الموقع وحده لا يكفي؛ إذ إن الاتجاه الذي يُوجَّه إليه كل مستشعر لا يقل أهمية عن موقعه. الخطأ الشائع هو تركيب المستشعرات بشكل مسطح على السقف أو الجدار، وتوجيهها مباشرة إلى الأسفل أو عبر الممر مباشرة. يقلل هذا التوجيه من قدرتها على رصد الحركة عن بُعد.
دور عدسة المستشعر وشكل الحزمة
يحتوي كل مستشعر حركة على عدسة تشكّل منطقة رصده في نمط محدد ثلاثي الأبعاد. وفهم هذا الشكل أمر أساسي للتوجيه الاستراتيجي. فالعدسة طويلة المدى، على سبيل المثال، تصنع حزمة ضيقة ومستطيلة مصممة خصيصاً للممرات. وإن الجمع بين العدسة المناسبة والموقع الصحيح يضاعف من كفاءة النظام. والهدف هو عرض حزمة الاستشعار لأبعد مسافة ممكنة في مسار المستخدم.
التوجيه المسبق للمسار

لتحقيق استشعار استباقي، يجب توجيه المستشعرات في التوزيع المتناوب بزاوية إلى الأمام قليلاً، بحيث تشير إلى أسفل الممر في اتجاه الحركة. ويجب توجيه المستشعر الموجود على الجدار الأيسر نحو الجانب الأيمن من الممر في نقطة أبعد، والعكس صحيح. يتيح هذا التوجيه الاستشرافي إرسال مخروط الاستشعار الخاص بالمستشعر إلى مسافة بعيدة أمام المستخدم، مما يرصد قدومه قبل وصوله إلى تلك المنطقة بوقت طويل. ولم يعد النظام يقتصر على رؤية ما هو تحته مباشرة، بل أصبح يتطلع إلى الأمام لما هو قادم.
الركيزة 3: المنطق الزمني والمخازن المؤقتة للتشغيل المسبق
تستخدم الركيزة الأخيرة ذكاءً على مستوى النظام لربط استراتيجيات التوزيع الهندسي والتوجيه. فحتى مع التوزيع المثالي للمستشعرات، يوجد تأخير صغير ولكن ملحوظ بين رصد الحركة وتشغيل الضوء. ويقضي النظام السلس حقاً على هذا التأخير باستخدام مخازن مؤقتة للتشغيل المسبق. فعندما يرصد مستشعر حركة في المنطقة A، لا يكتفي نظام التحكم بتشغيل الأضواء في المنطقة A فحسب، بل يرسل أيضاً أمر "تشغيل مسبق" إلى الأضواء في المنطقة المنطقية التالية، وهي المنطقة B.
يمكن أن يعمل هذا التشغيل المسبق بطريقتين. إما أن يقوم النظام بتشغيل أضواء المنطقة B بالتزامن مع المنطقة A، مما يضمن إضاءة المسار الأمامي بالكامل على الفور. أو يمكنه إدخال مخزن مؤقت لأجزاء من الثانية، لتشغيل أضواء المنطقة B قبل دخول المستخدم مباشرة، مما يخلق "موجة" ديناميكية من الضوء تتحرك معه. ويرتقي هذا المنطق الزمني بالنظام من مجرد سلسلة من المستشعرات المستقلة إلى شبكة واحدة متماسكة.
احصل على الإلهام من مجموعات مستشعرات الحركة من Rayzeek.
ألم تجد ما تبحث عنه؟ لا تقلق، فهناك دائماً طرق بديلة لحل مشاكلك. ربما يمكن لإحدى مجموعات منتجاتنا أن تساعدك.
النظام الكامل: تصميم تجربة إضاءة سلسة
عند الجمع بين هذه الركائز الثلاث — المسافات المتناوبة، والتوجيه الأمامي، والمخازن المؤقتة الزمنية — تختفي مشكلة "ملاحقة الضوء". ويصبح نظام إضاءة الممر مشاركاً نشطاً في توجيه المستخدم.
جولة محاكاة لرحلة المستخدم المثالية

في النظام المصمم بشكل صحيح، يتم رصد العميل الذي يدخل الممر بواسطة أول مستشعر موجه للأمام. وعلى الفور، تشتعل الأضواء في منطقته الحالية والمنطقة التالية أمامه. ومع تقدمه في السير، يتحرك عبر مساحة مضاءة باستمرار. وتتتبع المستشعرات المتناوبة والمتداخلة تقدمه، ويستمر منطق النظام في تشغيل المنطقة التالية في التسلسل قبل وصوله إليها بوقت كافٍ. وتنطفئ الأضواء خلفه بعد تأخير محدد لتوفير الطاقة. إنها تجربة سلسة وآمنة وتمنح شعوراً بالذكاء التلقائي.
تطوير المبادئ للمنعطفات والزوايا الغائرة
هذه المبادئ قابلة للتطويع. فبالنسبة لمنعطف بزاوية 90 درجة، يجب وضع مستشعر قبل المنعطف مباشرة، وتوجيهه لرصد الشخص الذي يقترب منه. وتتمثل الوظيفة الأساسية لهذا المستشعر في التشغيل المسبق للأضواء حول المنعطف، مما يضيء المسار الجديد قبل أن يراه المستخدم. أما بالنسبة للزوايا الغائرة أو المداخل، فغالباً ما يكون مجال الرؤية الواسع لمستشعرات الممر الرئيسية كافياً. والمفتاح هنا هو تحليل مسار الحركة المحتمل ووضع المستشعرات عند نقاط اتخاذ القرار لإضاءة الطريق إلى الأمام دائماً.







