
Het is een bekende ervaring in self-storage faciliteiten en gebouwen met lange, eentonige gangen. Een klant duwt een karretje een donkere gang in en de lichten springen net een moment te laat aan, ofwel direct boven hun hoofd of, erger nog, vlak achter hen. Ze worden gedwongen om constant het donker in te lopen, wat het hardnekkige gevoel geeft dat ze altijd een stap achterlopen. Het is een kleine ontwerpfout die zorgt voor een aanzienlijk gevoel van ongemak en goedkoopte. De oplossing is niet om bestaande systemen gevoeliger te maken, maar om ze intelligenter te maken.
Dit probleem van 'lichtvertraging' kan permanent worden opgelost met een systematische aanpak die de verlichting van een gebouw transformeert van een reactief systeem naar een anticiperend systeem. Door de plaatsing, de afstelling en de timing van de sensoren zorgvuldig te plannen, kunt u een naadloze ervaring creëren waarbij het pad altijd ruim voor de aankomst van een persoon verlicht is, waardoor ze als door een onzichtbare hand vooruit worden geleid. Deze methode zorgt ervoor dat klanten nooit meer hun karretje in het donker hoeven te duwen.
Het algemene gangprobleem: achter het licht aanlopen
In een standaard bewegingsgeactiveerd systeem regelt een enkele sensor een specifieke zone met lichten. Wanneer een persoon die zone betreedt, detecteert de sensor beweging en schakelt de armaturen in. In een lange gang zorgt dit voor een onsamenhangende ervaring van het bewegen van de ene poel van licht naar de volgende. Het systeem reageert altijd op aanwezigheid, in plaats van te anticiperen op de intentie. Als gevolg hiervan bevindt de gebruiker zich voortdurend aan de rand van de detectiezone, waardoor het licht pas wordt geactiveerd op het moment dat ze arriveren en ze worden gedwongen om in de gang 'achter het licht aan te lopen'—een constante herinnering dat het systeem achterloopt.
De gevoeligheidsval: waarom het omhoog draaien van de knop voor meer problemen zorgt
De meest voorkomende reactie op lichtvertraging is het verhogen van de gevoeligheid van de bewegingssensoren. De logica lijkt waterdicht: een gevoeligere sensor zou beweging van grotere afstand moeten detecteren en de lichten sneller moeten activeren. In de praktijk werkt deze aanpak vaak averechts en introduceert het nieuwe problemen.
Valse triggers door verkeer in kruisende gangen
Hoge gevoeligheidsinstellingen maken sensoren, met name passief infrarood (PIR) types, zeer vatbaar voor het detecteren van beweging buiten hun beoogde zone. In een self-storage faciliteit betekent dit dat iemand die door een hoofdgang loopt, lichten kan activeren in een kruisende gang die hij of zij helemaal niet wil betreden. Deze activering in kruisende gangen verspilt energie en creëert een storend 'lichtshow'-effect, waarbij lege gangen constant aan- en uitschakelen. Het systeem wordt onrustig en inefficiënt, waardoor het ene probleem wordt opgelost door een ander te creëren.
De wet van de verminderde meeropbrengst bij hoge gevoeligheid
Vanaf een bepaald punt levert het verhogen van de gevoeligheid geen enkel voordeel op voor vroege detectie in een lang, smal pad. Het vermogen van een sensor om beweging te detecteren is afhankelijk van het lensontwerp en de aard van de beweging. Beweging rechtstreeks naar een PIR-sensor toe of ervan af is inherent moeilijker te detecteren dan beweging die het gezichtsveld kruist. Het opendraaien van de gevoeligheid verandert niets aan deze fundamentele beperking; het zorgt er alleen voor dat de sensor beter wordt in het oppikken van kleine, zijdelingse bewegingen—vaak de bron van valse triggers. Het kernprobleem van het op afstand detecteren van voorwaartse beweging blijft onopgelost.
Het fundamentele principe: van reactie naar anticipatie
Als het verhogen van de gevoeligheid niet het antwoord is, wat dan wel? De oplossing vereist een mentaliteitsverandering: in plaats van te proberen een reactief systeem sneller te maken, is het doel om een anticiperend systeem te ontwerpen dat geometrie en logica gebruikt om het pad van een gebruiker te voorspellen. De verlichting moet geen reactie zijn op waar de persoon zich bevindt, maar een voorbereiding op waar deze naartoe gaat. Dit wordt bereikt via drie gecoördineerde principes: positionering, afstelling en temporele logica.
Pijler 1: Geometrische positionering en de verspringende sensoropstelling
Een enkele sensor, hoe krachtig ook, is een single point of failure met een beperkte detectiezone. De sleutel tot een effectieve dekking van de gang is het gebruik van meerdere sensoren in een opstelling die continue, overlappende gezichtsvelden creëert. De meest effectieve geometrie hiervoor is een verspringende opstelling. In plaats van sensoren in een rechte lijn door het midden van de gang te plaatsen, worden ze afwisselend van de ene naar de andere kant van de gang geplaatst.
Misschien bent u geïnteresseerd in

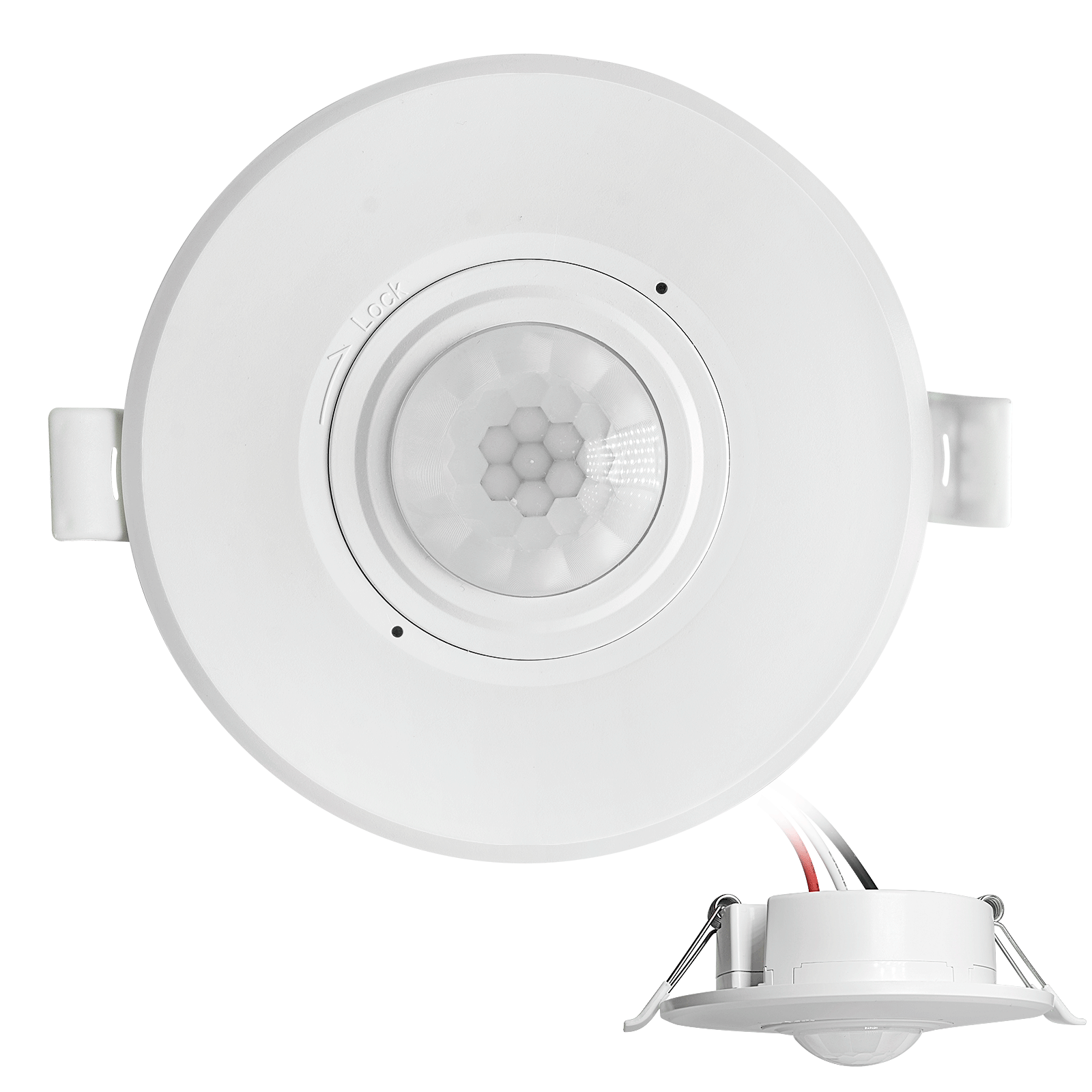
- Plafondgemonteerde PIR-aanwezigheidssensor met potentiaalvrije relaisuitgang
- 12/24VDC of 12/24VAC laagspanningsvoeding
- Geïsoleerde relaiscontacten (COM, NO en NC) voor EMS-, HVAC- en gebouwbeheersystemen

- Laagspannings DC microwave inbouw-plafondbewegingsmelder
- 12 VDC / 24 VDC ingang met een bereik van 10-30 VDC
- Max. 10A werkstroom met instelbare uitschakelvertraging, lichtgevoeligheid (Lux) en gevoeligheid
- Microwave inbouw-plafondbewegingsmelder voor hogere belastingen
- 100-265 VAC netspanningsingang, 10A-model
- 5,8 GHz microwave-detectie met instelbare uitschakelvertraging, lichtgevoeligheid (Lux) en gevoeligheid
- Microwave inbouw-plafondbewegingsmelder
- 100-265 VAC netspanningsingang, 5A-model
- 5,8 GHz microwave-detectie met instelbare uitschakelvertraging, lichtgevoeligheid (Lux) en gevoeligheid
- Plafondgemonteerde RZ037 PIR aanwezigheidsmelder met dimmer voor 220V-stroomvoorziening
- Maximale werkstroom van 3A met een nominale belasting van 660W
- LUX-knop regelt de AAN/UIT-functie van de lichtsensor en de door de gebruiker ingestelde dimhelderheid
- Plafondgemonteerde RZ037 PIR aanwezigheidsmelder met dimmer voor 110V-stroomvoorziening
- Maximale werkstroom van 3A met een nominale belasting van 330W
- LUX-knop regelt de AAN/UIT-functie van de lichtsensor en de door de gebruiker ingestelde dimhelderheid

- Laagspannings DC microwave plafondbewegingsmelder
- 12 VDC / 24 VDC ingang met een bereik van 10-30 VDC
- Max. 10A werkstroom met instelbare uitschakelvertraging, lichtgevoeligheid (Lux) en gevoeligheid
- Microwave plafondbewegingsmelder voor hogere belastingen
- 100-265 VAC netspanningsingang, 10A-model
- 5,8 GHz microwave-detectie met instelbare uitschakelvertraging, lichtgevoeligheid (Lux) en gevoeligheid
- Microwave plafondbewegingsmelder
- 100-265 VAC netspanningsingang, 5A-model
- 5,8 GHz microwave-detectie met instelbare uitschakelvertraging, lichtgevoeligheid (Lux) en gevoeligheid
- Laagspannings DC PIR inbouw-plafondbewegingsmelder
- 12 VDC / 24 VDC ingang met een bereik van 10-30 VDC
- Max. werkstroom 10A met instelbare uitschakelvertraging, lichtgevoeligheid (Lux) en gevoeligheid
- Inbouw plafond PIR-bewegingssensor schakelaar voor hogere belastingen
- 100-265 VAC netspanningsingang, 10A-model
- 360-graden detectie met aanpasbare tijdvertraging, lux-drempelwaarde en gevoeligheid
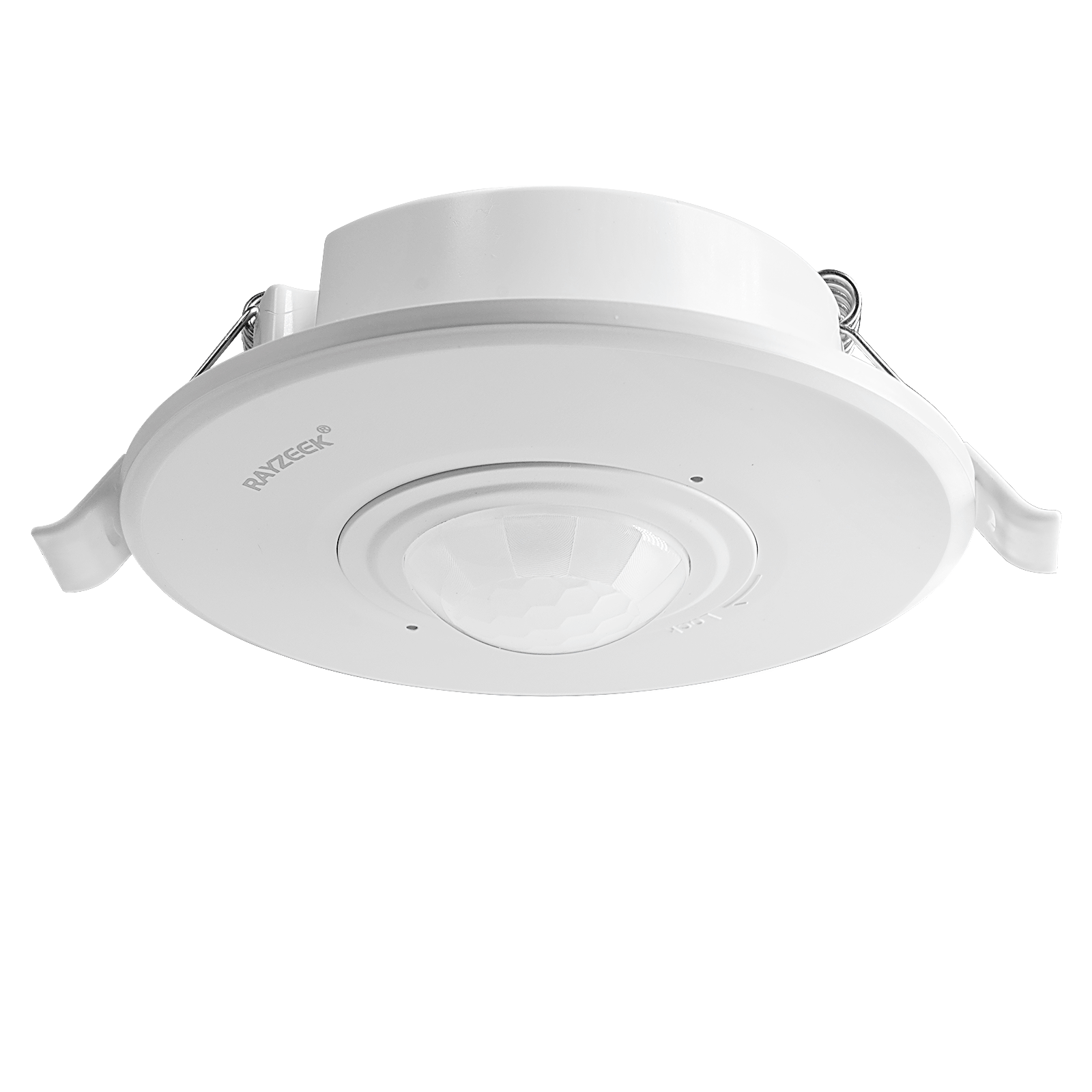
- Inbouw plafond PIR-bewegingssensor schakelaar
- 100-265 VAC netspanningsingang, 5A-model
- 360-graden detectie met aanpasbare tijdvertraging, lux-drempelwaarde en gevoeligheid
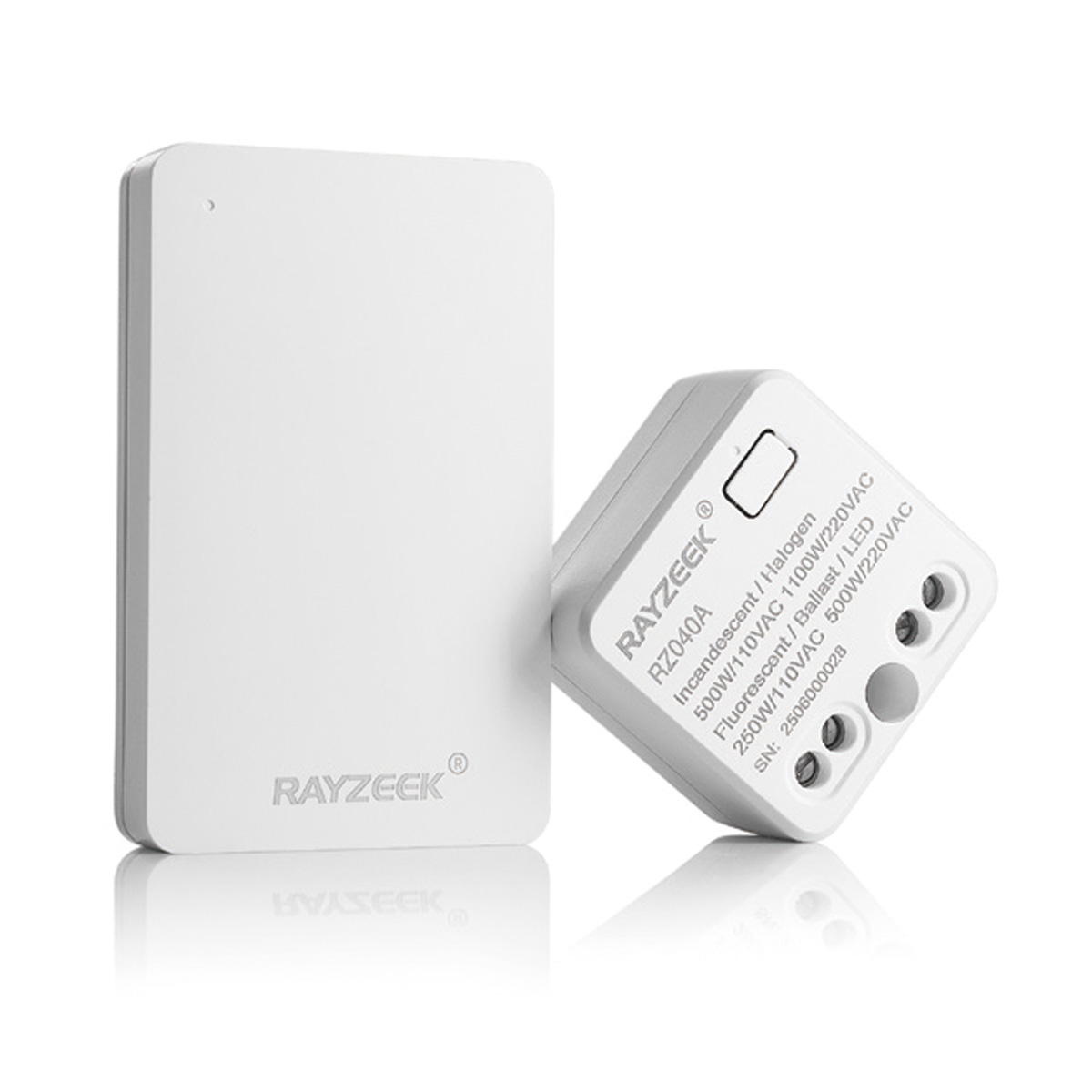
- Draadloze schakelaar- en ontvangerkit voor ON/OFF-verlichtingsregeling binnenshuis
- 100-230VAC, 50/60Hz ontvanger met 5A nominale stroom
- CR2032-aangedreven draadloze schakelaar met 2.4GHz communicatie
- Aanwezigheid (Auto-ON/Auto-OFF)
- 12–24V DC (10–30VDC), tot 10A
- 360°-bereik, 8–12 m diameter
- Tijdvertraging 15 s–30 min
- Lichtsensor Off/15/25/35 Lux
- Hoge/Lage gevoeligheid
- Auto-ON/Auto-OFF aanwezigheidsmodus
- 100–265V AC, 10A (nuldraad vereist)
- 360°-bereik; 8–12 m detectiediameter
- Tijdvertraging 15 s–30 min; Lux OFF/15/25/35; Gevoeligheid Hoog/Laag
- Auto-ON/Auto-OFF aanwezigheidsmodus
- 100–265V AC, 5A (nuldraad vereist)
- 360°-bereik; 8–12 m detectiediameter
- Tijdvertraging 15 s–30 min; Lux OFF/15/25/35; Gevoeligheid Hoog/Laag

- 100V-230VAC
- Transmissieafstand: tot 20m
- Draadloze bewegingssensor
- Bedrade bediening

- Spanning: 2x AAA-batterijen / 5V DC (Micro USB)
- Dag/Nacht-modus
- Tijdvertraging: 15 min, 30 min, 1 u (standaard), 2 u
- EU-stekker voedingsadapter
- UK-stekker voedingsadapter
Overlappende velden elimineren dode zones

Een verspringende opstelling zorgt ervoor dat wanneer een persoon door de gang loopt, deze zich nooit in een blinde vlek van de detectie bevindt. Voordat ze de detectiekegel van de eerste sensor verlaten, betreden ze al de kegel van de tweede, die verderop op de tegenoverliggende muur is geplaatst. Deze overlapping is cruciaal. Het voorziet het systeem van continue tracking-informatie en maakt een soepele, voorspellende overdracht van de ene verlichtingszone naar de volgende mogelijk.
Op zoek naar bewegingsgeactiveerde energiebesparende oplossingen?
Neem contact met ons op voor complete PIR-bewegingssensoren, bewegingsgeactiveerde energiebesparende producten, bewegingssensorschakelaars en commerciële oplossingen voor aanwezigheid/afwezigheid.
De juiste sensor kiezen voor lineaire detectie
De effectiviteit van deze opstelling wordt versterkt door de sensorkeuze. Hoewel standaard PIR-sensoren gebruikelijk zijn, kunnen systemen met microgolf- of dual-technology-sensoren superieure prestaties leveren in lange gangen. Microgolfsensoren zijn bijzonder bedreven in het detecteren van beweging naar de sensor, wat compenseert voor de belangrijkste zwakte van een PIR-sensor. In een verspringende opstelling kan een microgolfsensor die op de gang is gericht een naderende persoon veel eerder detecteren, wat de cruciale gegevens oplevert voor een anticiperend systeem.
Pilaar 2: Strategisch richten voor vooruitziende detectie
Plaatsing alleen is niet genoeg; de richting waarin elke sensor wordt gericht is net zo cruciaal. Een veelgemaakte fout is om sensoren plat tegen het plafond of de muur te monteren, waarbij ze recht naar beneden of direct dwars over de gang worden gericht. Deze oriëntatie minimaliseert hun vermogen om beweging op afstand te detecteren.
De rol van de sensorlens en de bundelvorm
Elke bewegingssensor heeft een lens die het detectiegebied vormgeeft in een specifiek driedimensionaal patroon. Het begrijpen van deze vorm is essentieel voor strategisch richten. Een lens met een groot bereik creëert bijvoorbeeld een smalle, langgerekte bundel die specifiek is ontworpen voor gangen. Het koppelen van de juiste lens aan de juiste plaatsing vermenigvuldigt de effectiviteit van het systeem. Het doel is om de detectiebundel zo ver mogelijk over het pad van de gebruiker te projecteren.
Vooruit richten op het pad

Om proactieve detectie te bereiken, moeten sensoren in een versprongen opstelling iets naar voren worden gekanteld, wijzend in de looprichting van de gang. Een sensor aan de linkermuur moet verderop in de gang naar de rechterkant worden gericht, en omgekeerd. Deze vooruitziende oriëntatie werpt de detectiekegel van de sensor ver voor de gebruiker uit, waardoor hun nadering wordt gedetecteerd lang voordat ze in die zone aankomen. Het systeem ziet niet langer alleen wat zich er direct onder bevindt; het kijkt vooruit naar wat er aan zit te komen.
Pilaar 3: Temporele logica en pre-triggerbuffers
De laatste pilaar maakt gebruik van intelligentie op systeemniveau om de geometrische en richtstrategieën met elkaar te verbinden. Zelfs met een perfecte sensorplaatsing is er een kleine, maar merkbare vertraging tussen bewegingsdetectie en de activering van het licht. Een werkelijk naadloos systeem elimineert deze vertraging door gebruik te maken van pre-triggerbuffers. Wanneer een sensor beweging detecteert in Zone A, activeert het besturingssysteem niet alleen de lichten in Zone A; het stuurt ook een "pre-trigger"-commando naar de lichten in de volgende logische zone, Zone B.
Deze pre-trigger kan op twee manieren werken. Het systeem kan de lichten van Zone B gelijktijdig met die van Zone A activeren, zodat het hele pad dat voor de gebruiker ligt direct verlicht is. Als alternatief kan het een buffer van minder dan een seconde introduceren, waardoor de lichten van Zone B net voordat de gebruiker binnenkomt aangaan, wat een dynamische "golf" van licht creëert die met hen meebeweegt. Deze temporele logica tilt het systeem van een reeks onafhankelijke sensoren naar één samenhangend netwerk.
Laat u inspireren door het assortiment Rayzeek-bewegingssensoren.
Vindt u niet wat u zoekt? Geen zorgen. Er zijn altijd alternatieve manieren om uw problemen op te lossen. Misschien kan een van onze portfolio's u helpen.
Het complete systeem: het ontwerpen van een naadloze verlichtingservaring
Wanneer deze drie pijlers – versprongen tussenruimte, vooruit richten en temporele buffers – worden gecombineerd, verdwijnt het probleem van het "achter het licht aanlopen". Het verlichtingssysteem van de gang wordt een actieve deelnemer in het begeleiden van de gebruiker.
Een rondgang door de ideale gebruikerservaring

In een goed ontworpen systeem wordt een klant die de gang binnenloopt opgemerkt door de eerste, vooruitgerichte sensor. De lichten in hun huidige zone en de volgende zone springen direct aan. Terwijl ze vooruit lopen, bewegen ze zich door een continu verlichte ruimte. De overlappende, versprongen sensoren volgen hun voortgang, en de logica van het systeem blijft de volgende zone in de reeks ruim voor hun aankomst activeren. Lichten achter hen gaan na een ingestelde vertraging uit om energie te besparen. De ervaring is soepel, veilig en voelt moeiteloos intelligent aan.
De principes aanpassen voor hoeken en nissen
Deze principes zijn flexibel toepasbaar. Bij een hoek van 90 graden moet een sensor net voor de bocht worden geplaatst, gericht om een naderend persoon te detecteren. De hoofdtaak van deze sensor is om de lichten om de bocht vooraf te triggeren, zodat het nieuwe pad al verlicht is voordat de gebruiker het überhaupt ziet. Voor nissen of deuropeningen is het brede gezichtsveld van de hoofdsensoren in de gang vaak voldoende. De sleutel is om het waarschijnlijke looppad te analyseren en sensoren op beslissingspunten te plaatsen om de weg vooruit altijd te verlichten.







